Apprentissage par la démonstration
Applications robotiques centrées sur l'humain, avec des robots qui peuvent apprendre de nouvelles tâches avec peu de démonstrations
Ceci demande de développer:
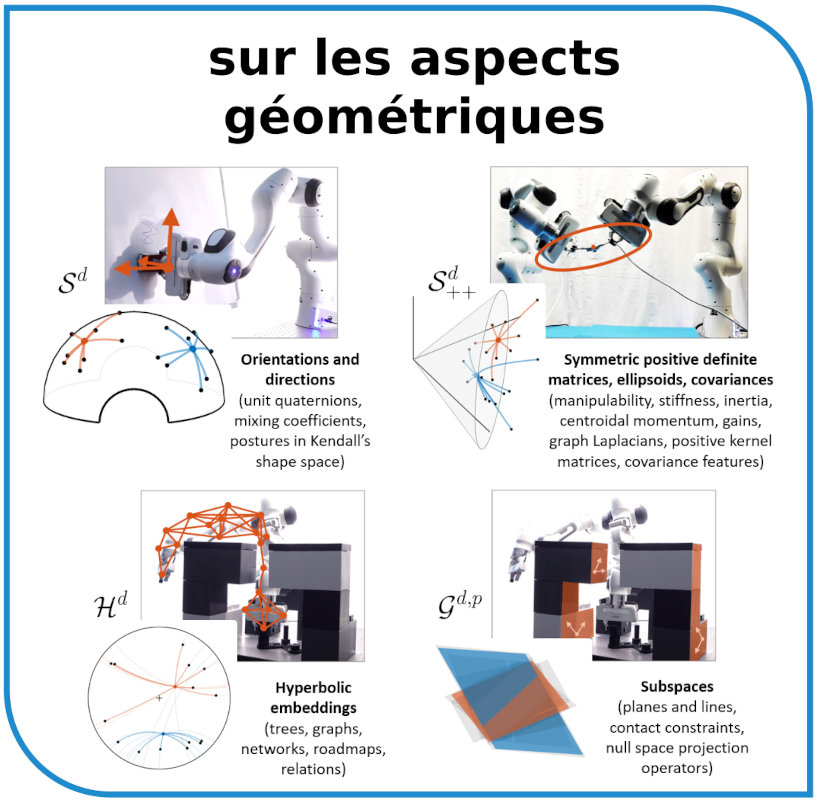
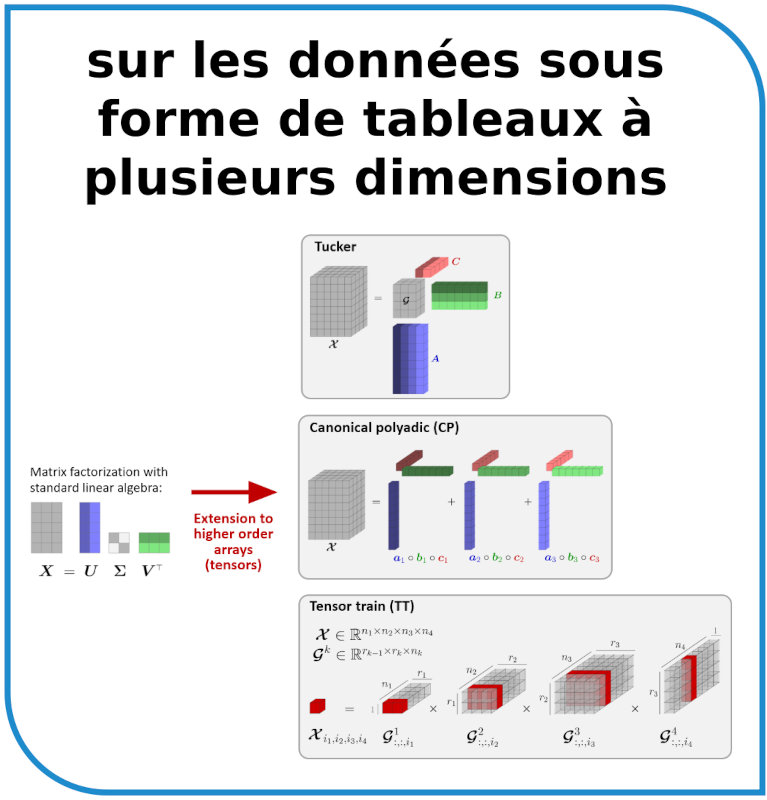
- des modèles exploitant les structures et les géométries des données collectées
- des contrôleurs adaptatifs exploitant les variations dans les tâches et les coordinations dans les mouvements
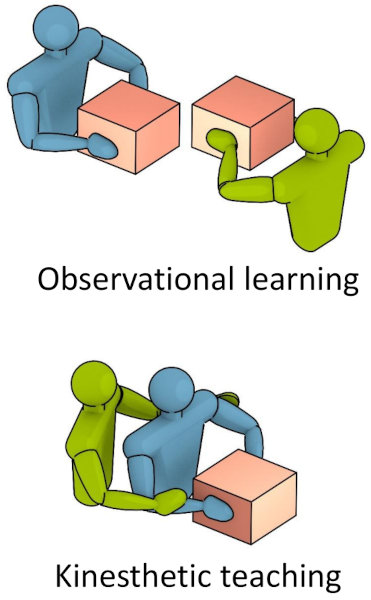
- des interfaces intuitives pour que le robot puisse collecter des démonstrations utiles
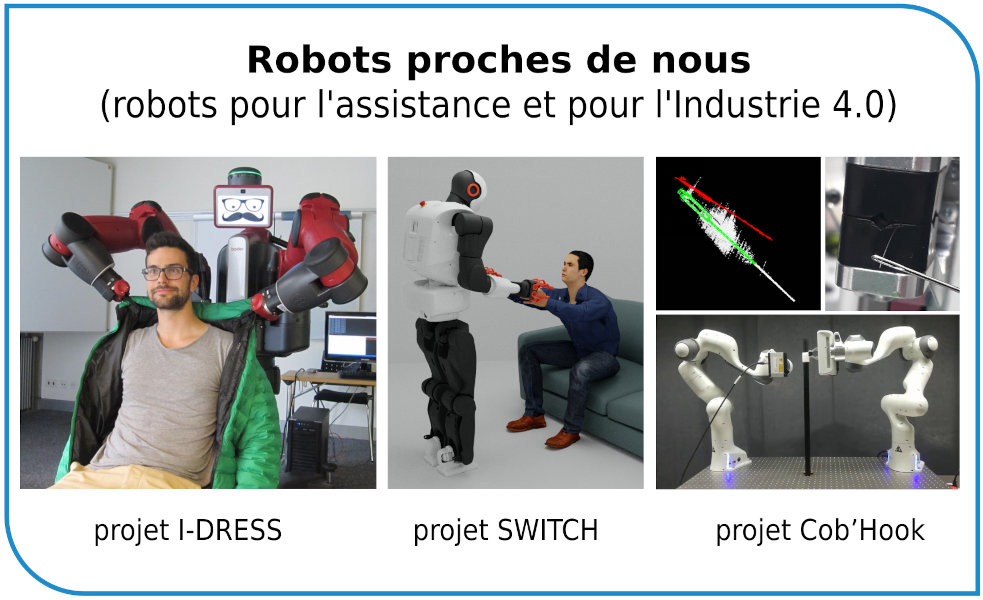
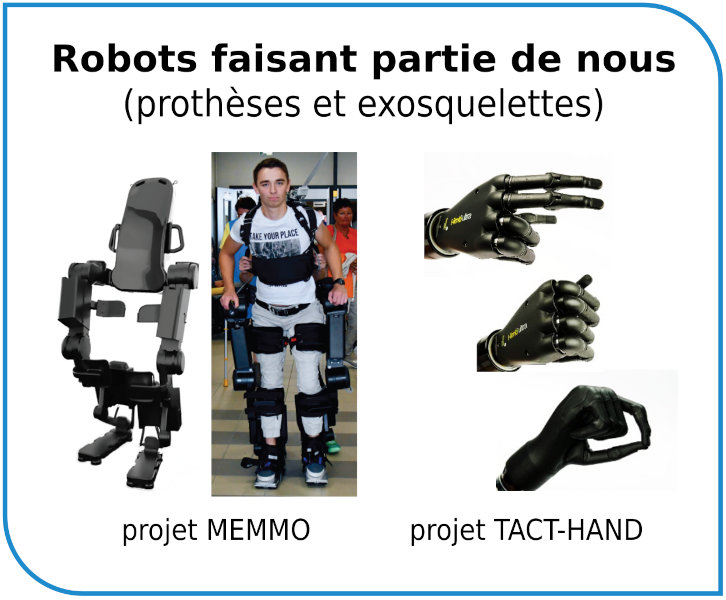
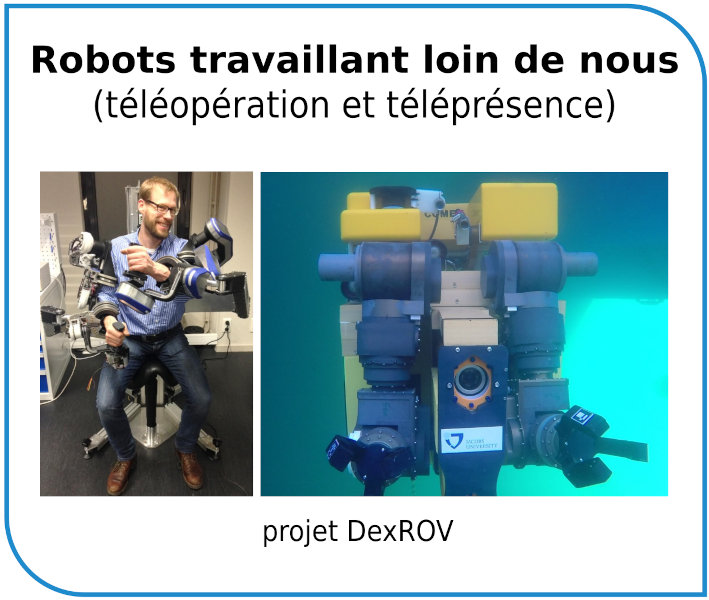
Applications ciblées
Apprendre à partir de quelques exemples seulement
La recherche en intelligence artificielle s’est focalisée ces dernières années sur des modèles d'apprentissage ne fonctionnant qu'avec un nombre gigantesque de données.
Dans plusieurs domaines d'applications, ces données sont disponibles ou peu coûteuses à collecter ou produire.
Cependant, d'autres applications telles que la robotique collaborative demandent de concevoir des modèles qui peuvent commencer à apprendre avec très peu de données, par interaction avec les utilisateurs, tout en restant assez riches pour que le système puisse continuer à apprendre si de nouvelles données deviennent disponibles.
Plusieurs types de structures à exploiter